2011-12-01
Spline Motion Transitions in Linear Subspaces
低次元化された空間内での簡単なスプライン関数の操作を通じて多様なモーション接続バリエーションを生成する技術 / Transition motion generation using simple spline editing in low-dimensional motion subpace (SIGGRAPH Asiia 2011 Sketch)
Software Design Studio, Tokyo Metropolitan Univ.
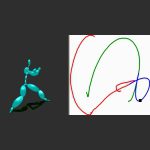
低次元化された空間内での簡単なスプライン関数の操作を通じて多様なモーション接続バリエーションを生成する技術 / Transition motion generation using simple spline editing in low-dimensional motion subpace (SIGGRAPH Asiia 2011 Sketch)

解析的7自由度逆運動学(7DOF-IK)を用いた四肢姿勢生成のための可動域モデル / A range of motion model for analytical inverse kinematics of limb-like articulated figure (SIGGRAPH Asia 2011 Poster)

不整地上のキャラクタ歩行モーションのインタラクティブ生成技術 / Interactive synthesis of character locomotion on uneven terrain using parametric looping motion (I3D 2011)

3次元キャラクタモーションを編集するための2次元タイムライン型インターフェース / Time-line interface for editing motion capture sequence with edit propagation mechanism (SCA 2009)
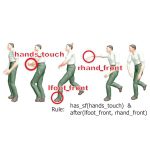
大規模データベースから特定種類のモーションデータを検索するための規則をユーザー編集可能な論理式として生成する技術 / Generating concise rules for retrieving motion data using inductive logic programming (SCA2007 poster, CASA 2009 short)
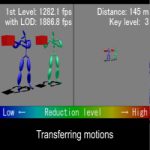
モーションブレンドの品質と計算量に関するLOD制御技術 / Level-of-detail method for interpolation-based motion synthesis (Pacific Graphics 2007, SCA 2006 poster)

地球統計学の分野で研究されているクリギング法を応用したモーション補間法 / Motion interpolation technique using universal kriging proposed in geostatistics and spatial statistics (SIGGRAPH 2005)

ユーザーが指定した手先・足先の制約位置を満たすキーフレームアニメーションを階層的強化学習によって自動的に探索する手法 / Hierarchical reinforcement learning for searching optimal keyframe animation that satisfies positional constraints of the end-effectors