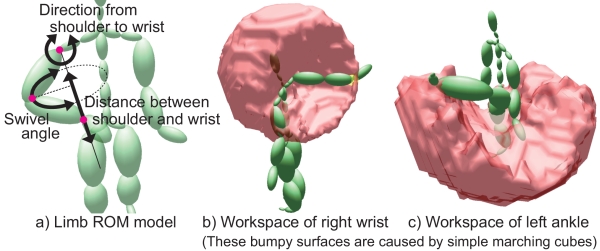
解析的7自由度逆運動学(7DOF-IK)を用いた四肢姿勢生成のための可動域モデル。関節角度の可動域ではなく、作業空間の制約範囲を定義することで、肩とひじ、股とひざの連動関係もモデル化する点がポイント。IK計算に先立って不自然な関節角度を除外できます。
We propose a model to represent ranges of limb motion (limb ROM) that defines a space of possible pose of a limb, instead of defining ROM of each joint. A limb ROM is composed of a valid 3D workspace of the wrist and a range of swivel angle at an arbitrary location in the workspace.
- Publications
- Tomohiko Mukai, Modeling Ranges of Limb Motion for Real-time Inverse Kinematics, Proceedings of SIGGRAPH Asia 2011 Posters, Article.4, 2011. [web] [poster] [pdf] [movie]